Summary
Due to the events that occurred on September 11, 2001, international concern regarding terrorism has increased, and how the latter has taken as its objective to affect the world economy according to its precepts. That is why the International Maritime Organization (IMO) has taken as a policy to strengthen international port security, taking into account the importance that the means of maritime transport has in international trade, and for that reason it has issued the International Code for the protection of Ships and Port Facilities (ISPS Code), where clear security policies are established for all ports that have international trade.
However, Colombia has a privileged location as it is bathed by 2 oceans, through which the shipping trade flows, and that is why it has a port infrastructure that must be in accordance with the precepts ordered in the ISPS. This code establishes underwater inspection practices for port structures, ship hulls and underwater soil. To carry out this task, this project seeks to develop a remotely operated underwater vehicle (ROV) in order to reduce the costs of underwater inspection without risking human lives, thus appropriating a technology that has been developed in the rest of the world. quite a lot, but in our country it is accessible only through large investments without appropriation of technology.
This is why the Almirante Padilla Naval Cadet School (ENAP) and the Universidad Pontificia Bolivariana (UPB), through the research groups in Naval Engineering (GIIN), Automation and Design A+D and the Institute of Energy and Thermodynamics (IET), decided to join efforts in pursuit of the integration of this technology to our country through the development of an underwater robotic platform in order to inspect the port structures and hulls of transport vessels, in order to comply with the ISPS code.
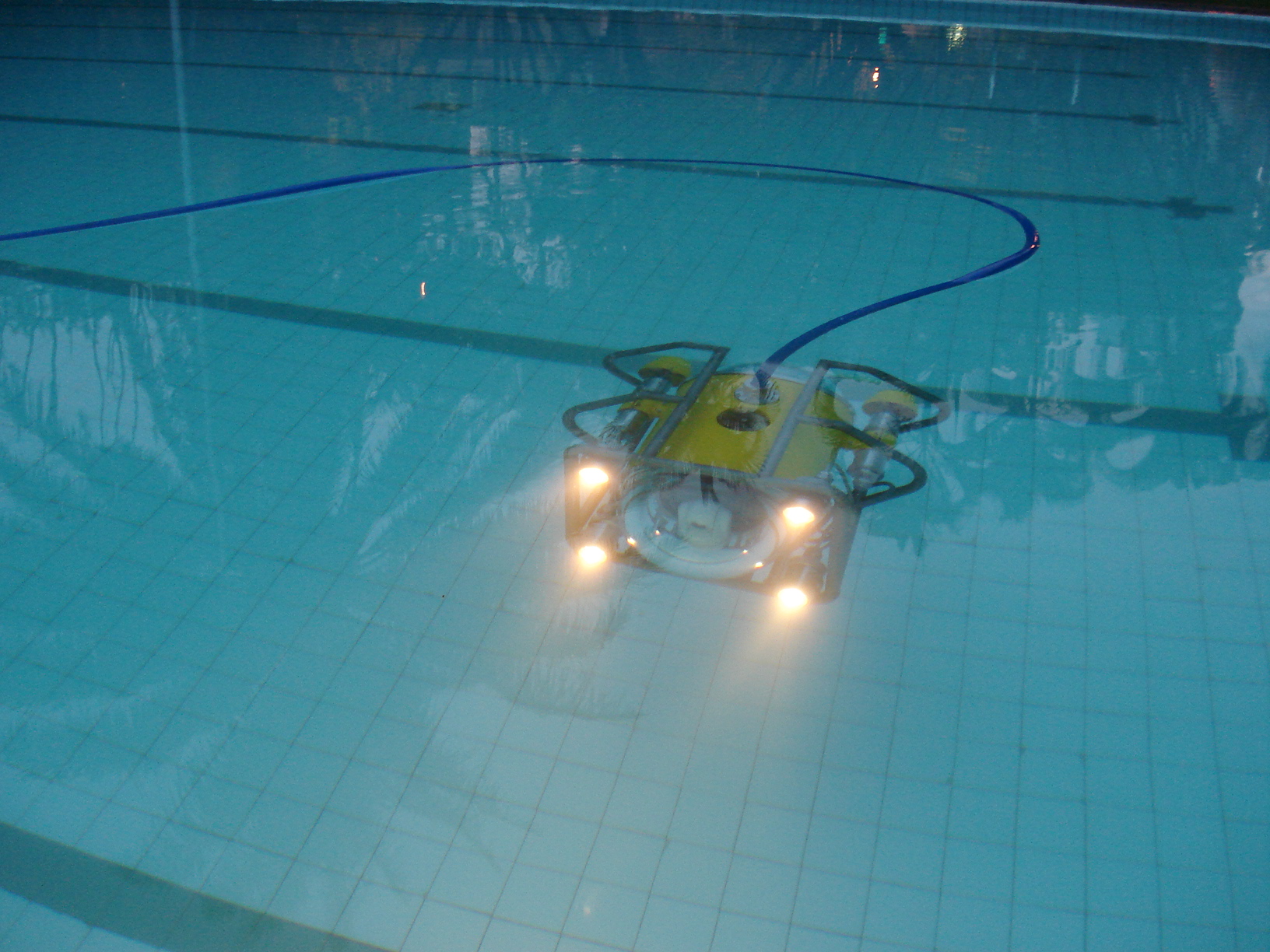
The remotely operated submersible vehicle has been fully developed, from preliminary design to detailed design. In addition, a prototype has been built and tested in the water, showing the effectiveness of the design. The ROV has been developed using the most modern design techniques from the mechanical point of view, with CAD, CAE and CAM software for some parts. Regarding the electronic hardware, the equipment was designed including state-of-the-art equipment to allow manual and semi-automatic operation of the ROV. The control software on board the ROV allows the software operation mode to be controlled from a console, allows monitoring of all the software variables and also allows communication with the surface station software that implements a graphical user interface to monitor the most important variables and control the movement of the robot with a joystick. The ROV has a robotic camera that allows remote inspection tasks to be carried out. The data communication system between the ground control station and the ROV is via ethernet for maximum flexibility. In this way, the processor and the camera on board the ROV can communicate with the surface station using the UDP/IP and TCP/IP protocols. The modularity and flexibility of the hardware and software design will allow future changes with great ease, for example to add other sensors and to modify the algorithms and logic of the control system. This underwater robotic system constitutes an important technological development that can be used for the planned inspection tasks in ports and other underwater investigation tasks.
Presentation




























































Construction

















Related publications
[1] L. B. Gutiérrez, C. A. Zuluaga, J. A. Ramírez, R. E. Vásquez, D. A. Flórez, E. A. Taborda, and R. A. Valencia, “Development of an underwater remotely operated vehicle (ROV) for surveillance and inspection of port facilities,” in Proceedings of the ASME 2010 International Mechanical Engineering Congress and Exposition. Volume 11: New Developments in Simulation Methods and Software for Engineering Applications; Safety Engineering, Risk Analysis and Reliability Methods; Transportation Systems, (Vancouver, British Columbia, Canada), pp. 631–640, The American Society of Mechanical Engineers ASME, ASME, November 12–18, 2010. Available: https://asmedigitalcollection.asme.org/IMECE/proceedings-abstract/IMECE2010/44489/631/340083, ISBN: 978-0-7918-4448-9, doi: https://doi.org/10.1115/IMECE2010-38217. pdf
[2] R. Valencia, J. A. Ramírez, L. B. Gutiérrez, and M. García, “Simulation of the thrust forces of a ROV,” in Primer Congreso Internacional de Diseno e Ingenieria Naval CIDIN 09, (Cartagena, Colombia), Corporación de Ciencia y Tecnología para el Desarrollo de la Industria Naval Marítima y Fluvial COTECMAR, Marzo 25-27, 2009. Presentation
[3] J. A. Ramírez, R. E. Vásquez, L. B. Gutiérrez, and D. A. Flórez, “Mechanical/naval design of an underwater remotely operated vehicle (ROV) for surveillance and inspection of port facilities,” in Proceedings of the ASME 2007 International Mechanical Engineering Congress and Exposition IMECE2007, Volume 16: Transportation Systems, (Seattle, WA, USA), pp. 351–361, The American Society of Mechanical Engineers ASME, ASME, November 11-15, 2007. Available: https://asmedigitalcollection.asme.org/IMECE/proceedings-abstract/IMECE2007/43106/351/326622, ISBN: 0-7918-4310-6, doi: https://doi.org/10.1115/IMECE2007-41706. pdf
[4] L. Cardona, M. Osorio, and L. B. Gutiérrez, “Sistema de navegación para vehículos no tripulados,” in Memorias XIII Congreso Latinoamericano de Control Automatico, (Mérida, Venezuela), IFAC, Noviembre 25-28, 2008. ISBN: 978-980-11-1224-2. pdf
[5] L. B. Gutiérrez, “Sistemas no tripulados,” in Memorias IV Colombian IEEE Workshop of Robotics and Automation, (Cali, Colombia), IEEE Colombia, Agosto 13-15, 2008. ISBN: 978958-8122-75-5. Presentation
[6] L. B. Gutiérrez, J. A. Ramírez, C. A. Zuluaga, R. E. Vásquez, D. A. Flórez, and R. A. Valencia, “Diseno básico de un vehículo operado remotamente (ROV) para inspección subacuática de instalaciones portuarias,” in Memorias 3rd IEEE Colombian Workshop on Robotics and Automation-CWRA 2007, (Cartagena, Colombia), IEEE Colombia, August 21-22, 2007. ISBN: 978-958-44-0805-1. pdf
[7] C. A. Zuluaga and L. B. Gutiérrez, “Infraestructura de simulacion para vehiculos no tripulados,” in Memorias VII Congreso de la Asociación Colombiana de Automática, (Cali, Colombia), Asociación Colombiana de Automática, Marzo 21-24, 2007. ISBN: 9789484408. pdf
[8] J. F. Franco and L. B. Gutiérrez, “Análisis de dominio de un marco de tiempo real para vehiculos autonomos no tripulados,” in Memorias VII Congreso de la Asociación Colombiana de Automática, (Cali, Colombia), Asociación Colombiana de Automática, Marzo 21-24, 2007. ISBN: 9789484408. pdfParagraphParagraph