Fault Tolerant Air Data System
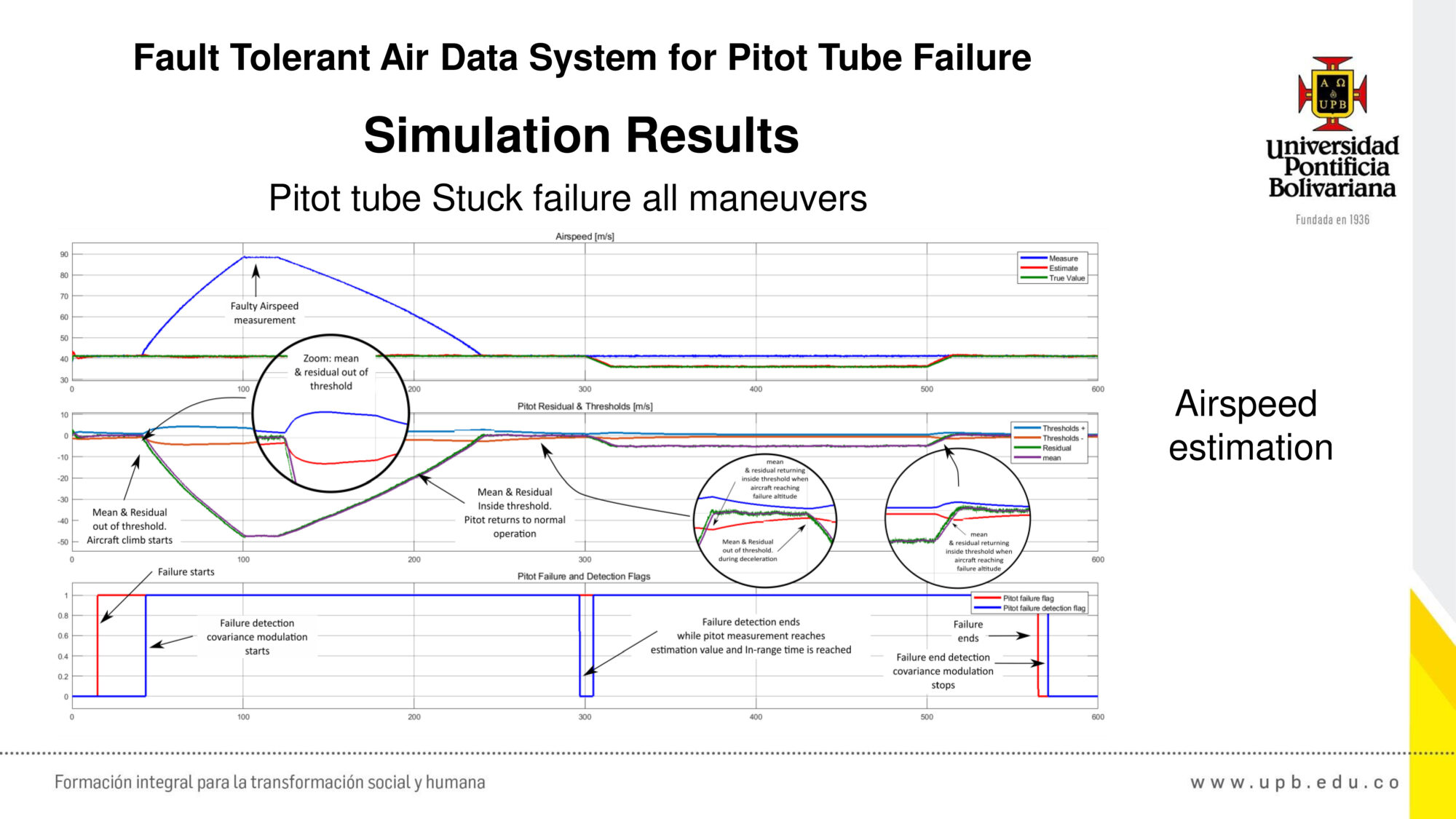
An integrated fault detection, identification, isolation, and accommodation scheme is proposed for an Air Data System with airspeed and angle of attack sensors. The system uses information from the inertial measurement unit, available air data sensors, and an aircraft digital twin model that provides virtual measurements of its aerodynamic and propulsion forces to feed a nonlinear estimator capable of detecting air sensor failure and suppressing sensor fault effects on the aircraft air data prediction.
UAV for research in Flight Mechanics and Control

A UAV was developed for research in Flight Mechanics and Flight Controls. The project involves integrating sensors with an embedded processor in a small fixed-wing aircraft and creating a flexible software infrastructure for implementing and testing flight control algorithms. The sensor suite consists of an IMU, a magnetometer, a GPS, a pitot tube with a differential pressure sensor, alpha and beta vanes, control surface position sensors, and a sensor for engine RPM. An actuator interface and RF communication link are also included for telecommand and telemetry.
Flight Data Recorder for acquisition of flight test data in a ultra light aircraft

A flight data recording system was developed for an ultralight aircraft. The aircraft was instrumented for recording data from certification flight tests and mathematical aircraft modeling.
Structure Manager, a software infrastructure for the implementation of Real Time Control Systems
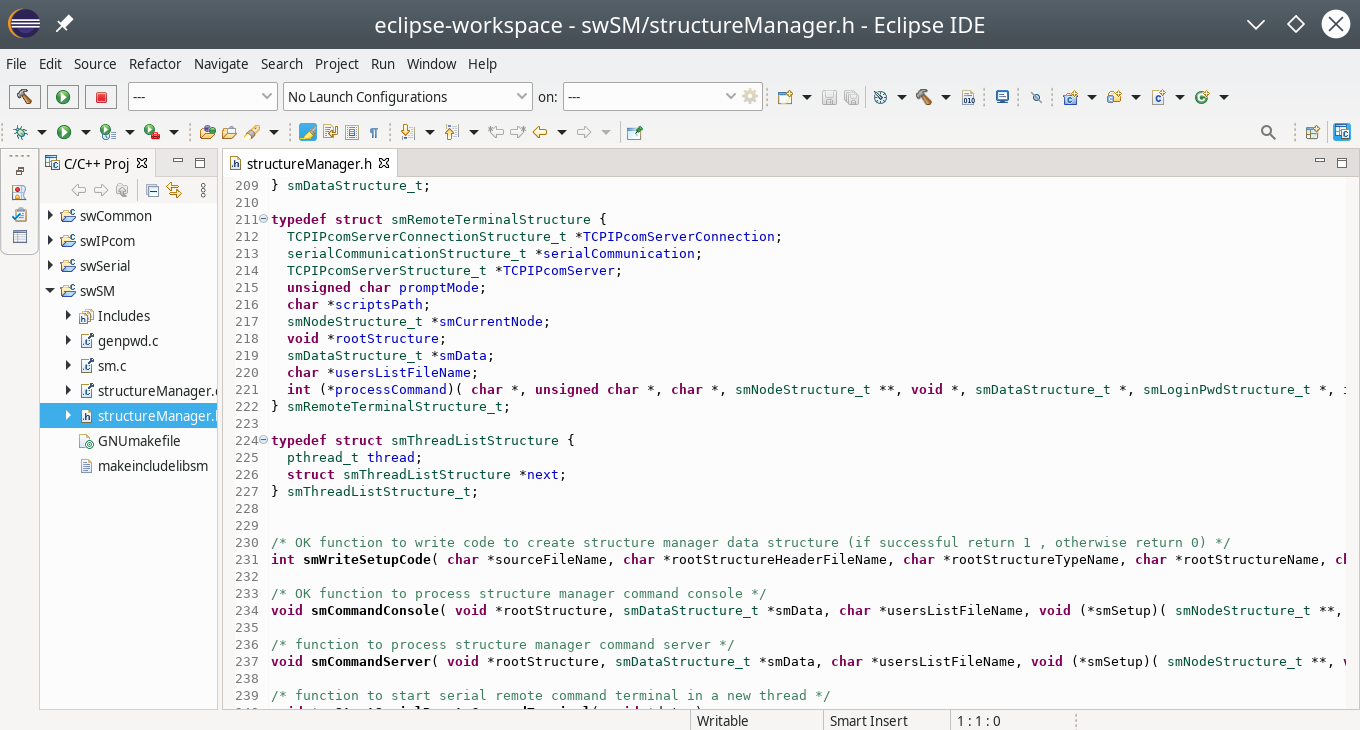
A software infrastructure for implementing real-time control systems has been developed in C language. The infrastructure, combined with a sound programming methodology (object-oriented), enables some powerful features in the real-time application, accelerating the production cycle of the software. The Structure Manager comprises a library that implements all the infrastructure functionality and a tool to automatically generate code at compilation time that connects the infrastructure with the application.
Andean Condor UAV

The Andean Condor unmanned aerial system is a tactical UAV for surveillance, exploration, reconnaissance, and intelligence. Possible applications in photogrammetry and precision agriculture are also considered. This development resulted from the project “Development of a fixed-wing unmanned aerial system for short-range missions – Aura Jr” (2007-2009).
Software for modeling, analysis and design of a fixed wing aircraft
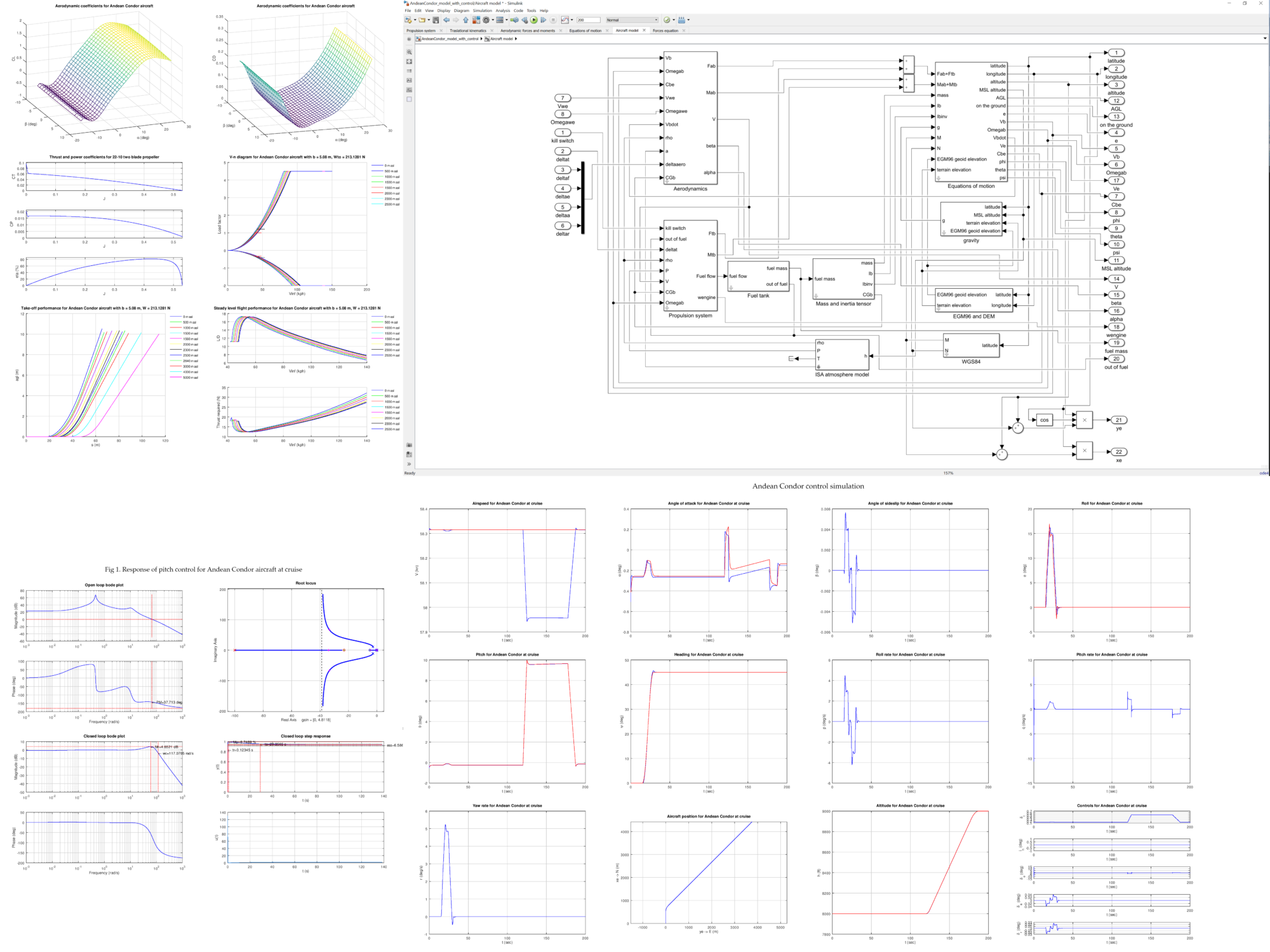
The software has been developed to model, analyze, and design a fixed-wing aircraft. The software comprises a set of functions written in the Matlab® language and is fully compatible with Octave and a collection of simulation models developed in Simulink® that include the simulation of the nonlinear aircraft model with the flight control system. Several versions of the simulation model are more refined than others.
VISOR 3 ROV
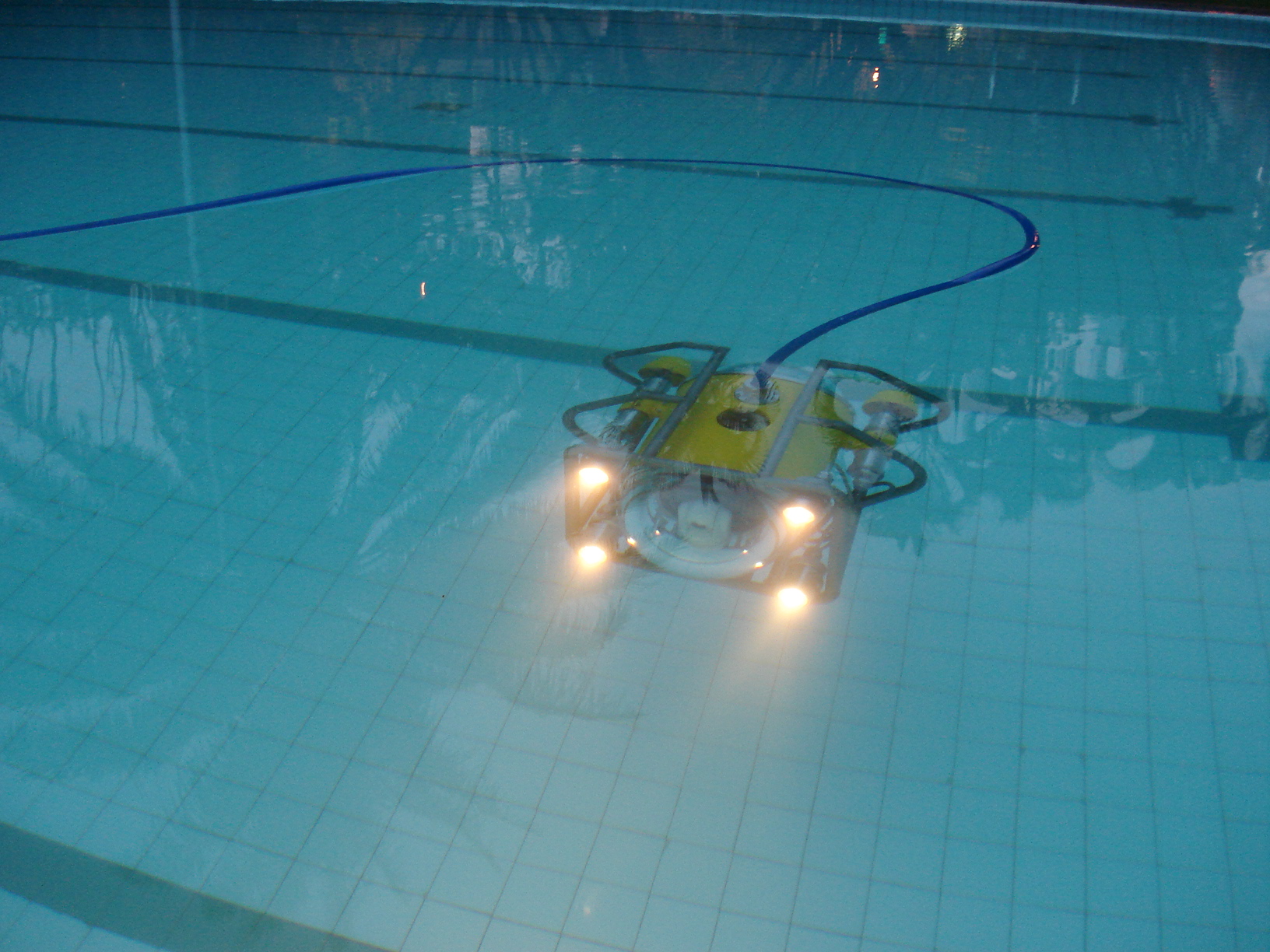
VISOR 3 is an ROV developed by the Excuela Naval Almirante Padilla (ENAP) and Universidad Pontificia Bolivariana (UPB), through the research groups in Naval Engineering (GIIN), Automation and Design A+D and the Institute of Energy and Thermodynamics (IET), with the support of Colciencias. The ROV is an underwater robotic platform for inspecting port structures and hulls of transport vessels to comply with the ISPS code.
Aura Jr UAV

Aura Jr was a small UAV for short-range missions, the first UAV developed at the Universidad Pontificia Bolivariana. The prototype was a technology demonstrator for the project “Research and Design of an Automatic Remote Inspection System for Electric Power Transmission Lines” (2004-2005) sponsored by Interconectado Eléctrica SA (ISA), Colciencias and Universidad Pontificia Bolivariana. It led to another project, “Development of a fixed-wing unmanned aerial system for short-range missions – Aura Jr” (2007-2009).
Preliminary design of Aura UAV for monitoring of Power Transmission Lines

The Aura UAV’s preliminary design resulted from the project “Research and Design of an Automatic Remote Inspection System for Electric Power Transmission Lines” (2004-2005). Its primary objective was to investigate and design an autonomous inspection system prototype for high and extra-high-voltage transmission lines.
Adaptive Mode Transition Control Architecture With an Application to Unmanned Aerial Vehicles

A new approach to unmanned aerial vehicles’ adaptive mode transition control was proposed. The proposed architecture consists of three levels: mission planning routines are at the highest level, where the information about waypoints the vehicle must follow is processed; the mid-level controller uses a trajectory-planning component to coordinate the task execution and provides set points for low-level stabilizing controllers. The adaptive mode-transitioning control algorithm resides at the lowest level of the hierarchy consisting of a mode-transitioning controller and the accompanying adaptation mechanism. A flight demonstration was done as part of a Software Enabled Control research program (sponsored by DARPA) to validate the control algorithms using the GTmax, the Georgia Tech UAV testbed.
VISOR 2 ROV

VISOR 2 was an ROV developed as an underwater vehicle with dual control (1998-2000). Julio Cesar Correa Rodríguez, Luis Benigno Gutiérrez Zea, and Laszlo Jurko led the project.
Neural Network Control of a Flexible Link
A neural network (NN) tracking controller was implemented on a single flexible link, and the performance results of the neural network controller were compared to that of proportional derivative (PD) and proportional integral derivative (PID) standard controllers. The NN controller comprises an outer PD tracking loop, a singular perturbation inner loop to stabilize the fast flexible-mode dynamics, and an NN inner loop to feedback linearize the slow pointing dynamics. It is shown that the tracking performance of the NN controller is far better than that of the PD or PID standard controllers. No offline training or learning was needed for the NN. An extra friction term was added to the tests to demonstrate the ability of the NN to learn unmodeled nonlinear dynamics.
























































































































































































